...........
شرح محرك السيرفو بالاردوينو ثلاث كودات لفهم اساس عمل Servo moto
|
في هذا الدرس سنتعلم كيفية التحكم بمحرك السيرفوموتور servomoteur))
سوف نحاول التعرف علي السرفو متور عناصره طريقة عمله كيفية تحريك المحرك بمختلف الاتجاهات مع ثلاث كودات اردوينو مختلفه
المكونات
|
|
ServoMotor محرك سيرفو
|
|
|
10kΩ variable resistor’pot’
|
|
|
Breadboard
|
|
|
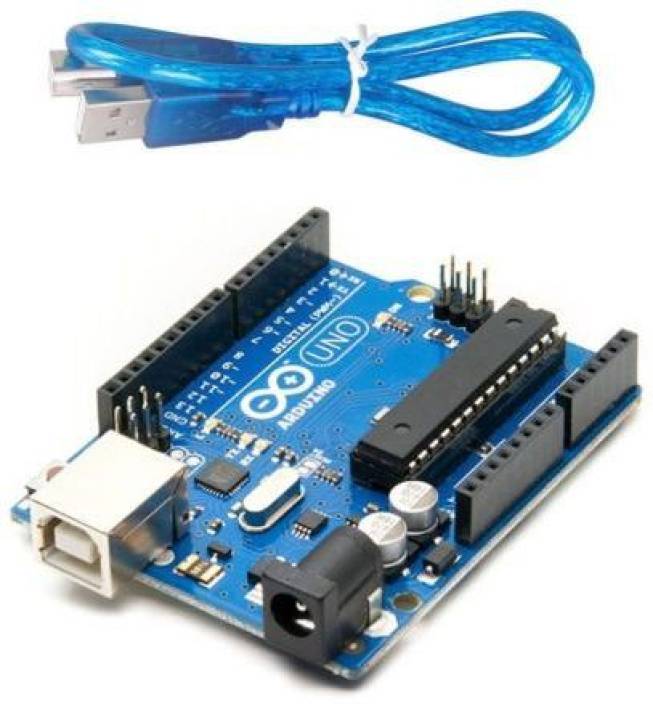
Arduino Uno R3
|
|
|
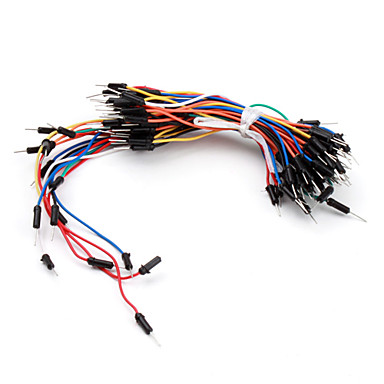
اسلاك توصيل
|
محرك السيرفو هو عبارة عن محرك يأتي مع علبة تروس تولد عزم أكبر، و يستطيع هذا المحرك الألتفاف 180 درجة و في بعض الأنواع 360 درجة
ولكي يبقى جهاز سيرفوموتور في موضع معين، يجب إرسال نبضة بطول يتراوح بين 1 و 2 ميلي ثانية كل 20 ميلي ثانية (أي بتردد 50 هرتز).
وتتطابق نبضة قدرها 1 ميلي ثانية واحدة مع زاوية 0 °.
النبضة من 2 ميلي ثانية تقابل زاوية 180 درجة.
وبإرسال نبضة بطول وسيط، يتم الحصول على زوايا مختلفة، بزاوية 90 درجة بنبضة تبلغ 1،5 ميلي ثانية، على سبيل المثال.
لمحرك السيرفو 3 اسلاك و هي
|
|
Vcc "و يكون بين 4.8 - 6 فولت" مدخل تغذية
|
Gnd مدخل الأرضي
|
مدخل التحكم و الذي نرسل الأوامر عبره لمحرك السيرف
|
فيديو الشرح
الكود 1 ..........














 →
→





أزال المؤلف هذا التعليق.
ردحذفأزال المؤلف هذا التعليق.
ردحذف